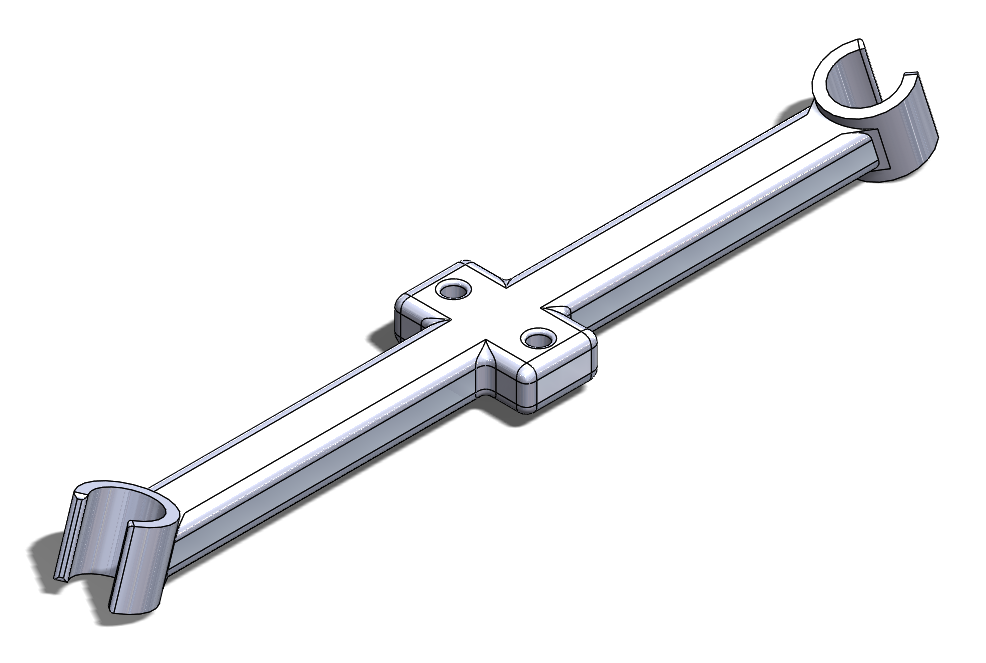
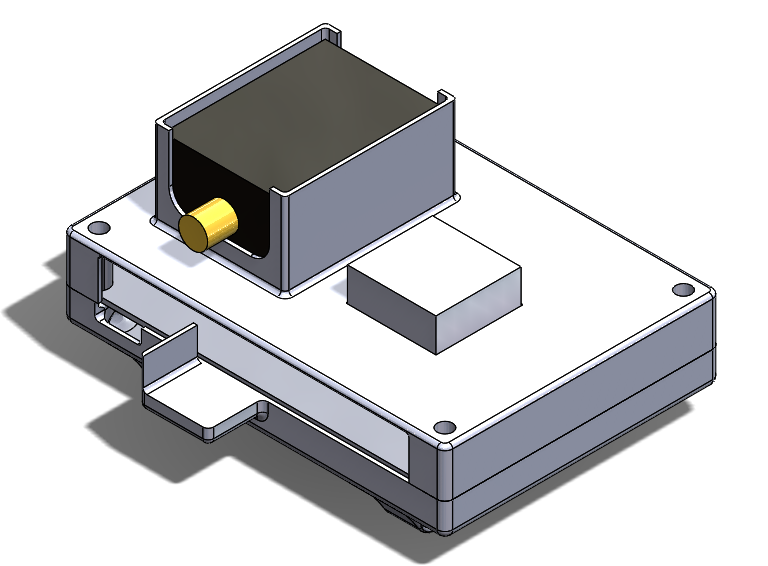
3D-Printed Parts
Code
All code for this project is hosted on the GitHub Site. This project is opensource and all code used for data processing and data collection on-board the UAV is made available to the public. The site contains two main folders:
- VEHICLE: Contains files meant to be downloaded to the companion computer (located on-board the vehicle). For full setup instructions reference Companion Computer Setup.
- POST_PROCESSING: This folder contains the MATLAB script UAVRT_main.m. This script calls the associated functions for processing flight data and I/Q radio data. Reference in code documentation and tutorial below for more information.
Example data is hosted on the UAV_RT Google Drive.